
Latest Algorithm for Optimizing Intelligent Transportation and Self-Driving Received by IEEE IV (2018)
Date:03-07-2018 | 【Print】 【close】
Recently, two papers from Shenzhen Institutes of Advanced Technology (SIAT) of the Chinese Academy of Sciences were accepted by IEEE Intelligent Vehicle Symposium (IV 2018), which demonstrated the research progress from the team of Prof. LI Huiyun, the Director of Center for Automotive Electronics of SIAT.
M.Sc. YANG Zhiheng, the first author of the paper “Real-time Pedestrian and Vehicle Detection for Autonomous Driving”, presented a pedestrian and vehicle detection algorithm to optimize feature extraction based on YOLOv2.
This research took advantage of the priori experience on the sizes of feature boxes, through statistical analysis on the datasets with the labels of pedestrians and vehicles, designed an initial value of the pre-selection box, which is more suitable for the characteristics of pedestrian and vehicle, compared with conventional training techniques for deep learning, this method optimized the pedestrian and vehicle detection.
The proposed algorithm not only improved the detection accuracy but also maintained good detection efficiency. The experiments on KITTI dataset verify that the optimization algorithm satisfied the real-time constraint as well as the accuracy of low-speed autonomous driving.
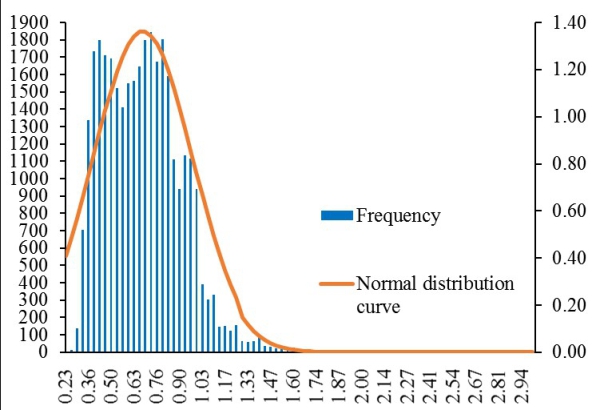
Fig.1 histogram distribution and normal distribution curve of the vehicle truth boxes height/width ratio on the KITTI datasets.(Image by LI Huiyun)
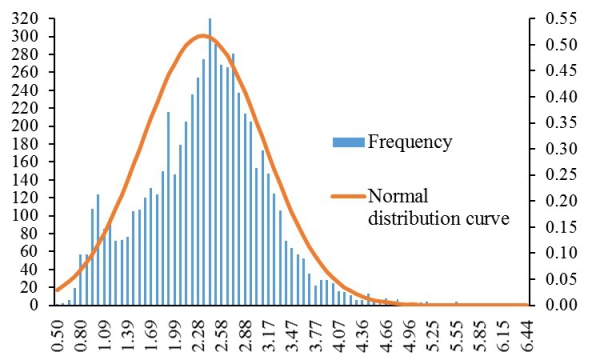
Fig.2 histogram distribution and normal distribution curve of the pedestrian truth boxes height/width ratio on the KITTI datasets. (Image by LI Huiyun)
Another paper named “Improved Sliding-Mode On-line Adaptive Position Control for AMT Clutch Systems Based on Neural Networks” from the first author Ms. ZOU Jie, designed an improved Sliding-Mode position controller based on Neural Networks.
In this research, the parameters of controller are tuned on-line adaptively to control the clutch system for getting better tracking performance during the vehicle starting. The clutch controller is embedded into a Modelica based vehicle model and verified through the Model-in-the-Loop (MiL) simulation. The simulation results demonstrated that the controller has better tracking performance and stronger robustness compared to the conventional controller, the parameters of which are tuned off-line via trial-and-error, that is time-consuming and often yield poor results. The method proposed in this paper enhances the generalization ability of the controller.
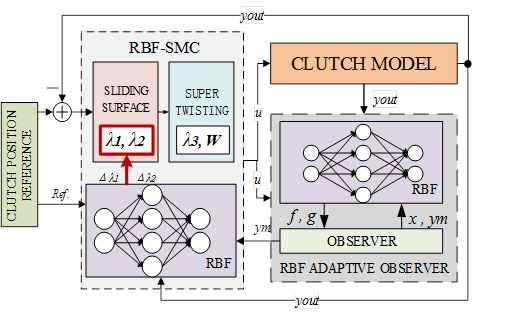
Fig.3 Structure of SMC with optimized sliding surface. (Image by LI Huiyun)
IEEE Intelligent Vehicle Symposium is one of the comprehensive conferences organized by the IEEE Intelligent Transport Association. It aims to hold a seminar of the most advanced technology for researchers, engineers and scholars around the world, the Symposium received 603 papers from 34 countries, and accepted 347 papers with 57% admission rate in 2018, its workshop entitled "Intelligent Transportation and Autonomous Vehicles" was successfully hosted by Prof. LI Huiyun in Changshu, China on June 26th, 2018.

