
Researchers Realize Microsized Sphere Rotation by New Microrobotic Manipulation System
Date:28-04-2020 | 【Print】 【close】
The precise manipulation of small objects is crucial in fundamental research and industrial applications. Micro-nanorobotic system is regarded as one of the most powerful technique for complex microsystems’ measurement, manufacture, and assembly.
But the flexible and precise manipulation of the tiny object in 3-D free space still remains a challenge.
Researchers the Shenzhen Institutes of Advanced Technology (SIAT) of the Chinese Academy of Sciences developed a microrobotic manipulation system and realized the precise rotation for microsized sphere. The study was published in IEEE Transactions on Automation Science and Engineering.
The microrobotic manipulation system was integrated with the microscope and six degrees-of-freedom (DOFs), composed of PC controller, motor drivers, microrobotic manipulator, optical lens and charge coupled device (CCD) camera.
Moreover, a feedforward compensation control strategy involving dual rotation was proposed for the precise manipulation of microsized sphere (~90 μm).
The microrobotic manipulator, with a size of 150 mm ×50 mm×70 mm, was mainly constructed by two independent units, left positioner (LP) and right positioner (RP). The LP comprised one rotary positioner and two nanometer linear positioners. The RP was formed via the three same nanometer resolution linear positioners.
The LP and RP worked simultaneously to adjust relative positions of two micropipettes. During the microsphere rotation, the micropipettes were needed to control cooperatively to exert appropriate squeeze force on the microsphere to avoid dropping the sphere and not damaging the sphere and micropipettes either.
Experimental results of two modes of rotation and release procedure conducted by using robotic feedforward compensation control of the cooperative flexible micropipettes, has demonstrated the feasibility and robust of proposed microrobotic manipulation system.
Compared with existing techniques only allowing limited amplitudes rotation, this study realized wide-angle rotation manipulation of microsized objects\sphere in 3-D free space, which would have a long-standing impact for the complex microsystems’ manufacture and assembly.
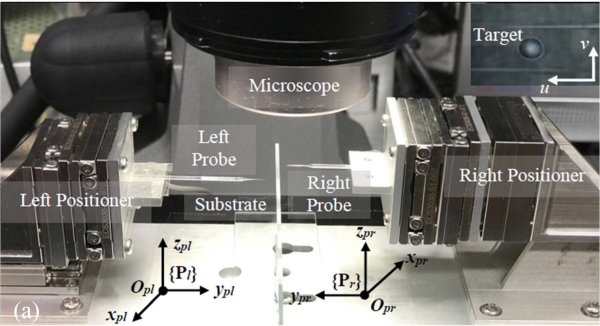
Microrobotic manipulation system with six DOFs. (Image by SIAT)
Media Contact:
ZHANG Xiaomin
Email: xm.zhang@siat.ac.cn

