
Give Surgeon Real Tactile Feeling via Newly Fiber Bragg Grating-Based Force Sensor
Date:12-01-2022 | 【Print】 【close】
The practice of minimally invasive surgery (MIS) has grown radically in popularity, since it has a number of advantages over conventional surgery which makes it appealing.
However, some problems found in traditional surgery are still associated with MIS. Tactile information ordinarily available during traditional open surgery is still yet to be effectively integrated into robot-assisted MIS. Thus, it is essential to address this limitation for real-time measurement of elasticity and stiffness of biological tissues during MIS.
A research team led by Prof. WANG Lei from the Shenzhen Institute of Advanced Technology (SIAT) of the Chinese Academy of Sciences recently developed a sensor based on Fiber Bragg Grating (FBG) sensing principle for tissue palpation during minimally invasive surgery.
The study was published in IEEE Transactions on Instrumentation and Measurement on 17, Dec.
The research team proposed a highly sensitive Fiber Bragg Grating (FBG) sensing solution for minimally invasive surgical tissue palpation. Unlike previous capacitive sensing solutions, fiber optic sensors are compatible with intraoperative magnetic resonance imaging (MRI) systems.
Fiber Bragg Gratings (FBGs) have been widely used in the sensing field because of their high sensitivity, low signal loss, and no influence from electromagnetic interference. But its central wavelength shift is cross-impacted by the temperature and strain, so the temperature compensation is an important criterion needed to accurately map the relationship between an applied force and the corresponding central wavelength shift.
In this study, this sensor design includes two FBGs, which are closely arranged in the sensor structure to detect palpation force while minimizing the interference of temperature and noise. The experimental results showed the designed force sensor design can measure force values in a range of 1N with an average relative error less than 2% of full scale, the average error value of the designed sensor after temperature compensation was 0.8 mN.
Therefore, tissue palpation experiments on pig liver organs were further done to verify the effectiveness and applicability of the proposed sensor design in minimally invasive surgery. The results showed that this sensor could be accurately used in tissue palpation and lump localization by searching at varying degrees of indentation depth during MIS.
The structure of the double grating decouples the temperature effect and effectively improved the force sensing accuracy of the sensor, thus increased the accuracy and safety of tissue palpation surgery.
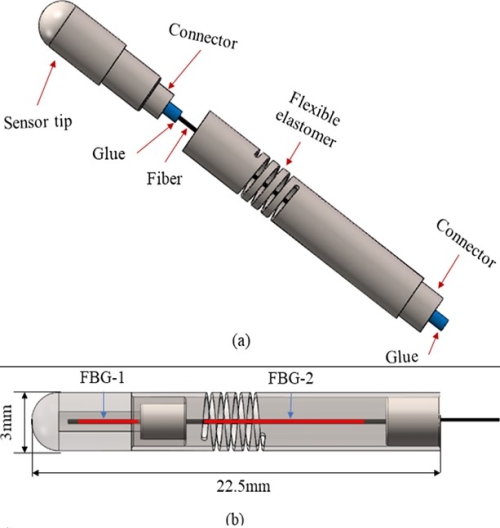
Fig. (a) Three-dimensional (3-D) assembly diagram of the designed sensor. (b) Dual FBG array method and size of sensor structure. (Image by SIAT)
Media Contact:
ZHANG Xiaomin
Email:xm.zhang@siat.ac.cn

